




welding robot industriae robotici brachii
Specification
Exemplar: NKRT61506B
Voltage: 380V
Payload: 6KG
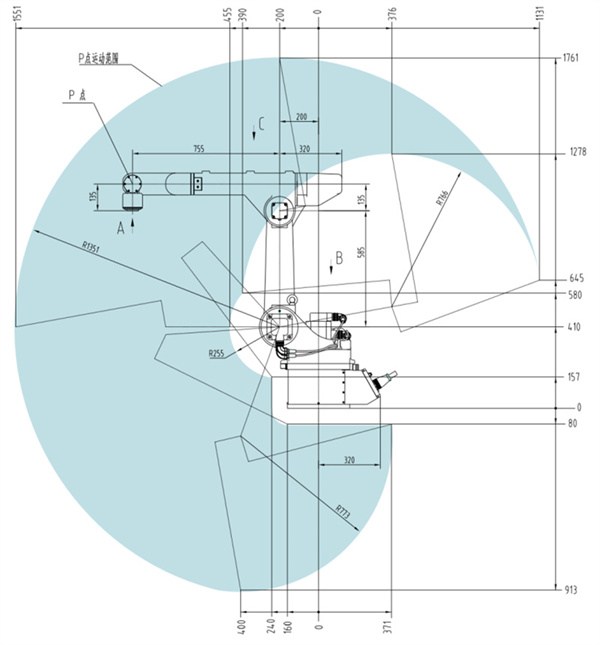
Arm range: 1551mm
Applicationem: welding (MIG/MAG/TIG) et alii
Axis: 6
Max payload: 6kg
Repetita locus: ±0.05mm
Potentia capacitatis: 2.5kw
Usus environment: 0℃-45℃
Institutionem: humum / parietem
Opus range:
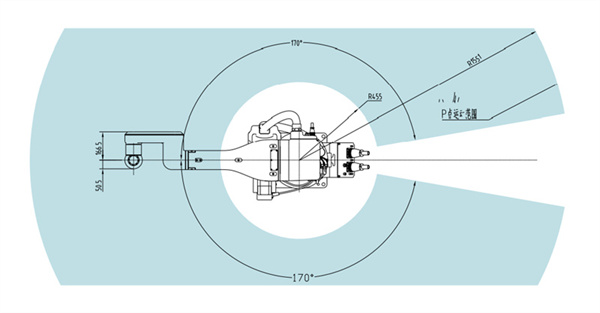
J1: ± 170°
J2: -70°+170°
J3: -85° ~+90°
J4: ± 360°
J5: ± 360°
J6: ± 360°
Celeritas max:
J1: 138°/s
J2: 138°/s
J3: 223°/s
J4: 270°/s
J5: 337°/s
J6: 1070°/s
opus dolor
Basi institutionem B-dir:
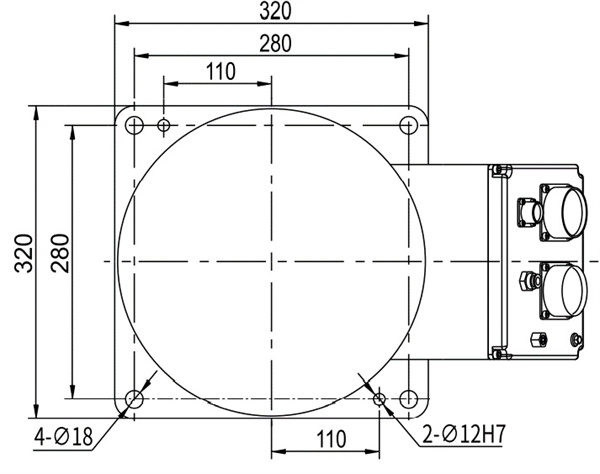
C-dir solidamentum macahine installation:
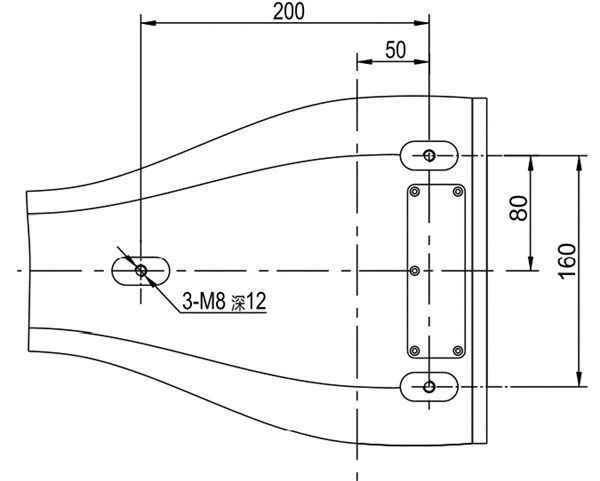
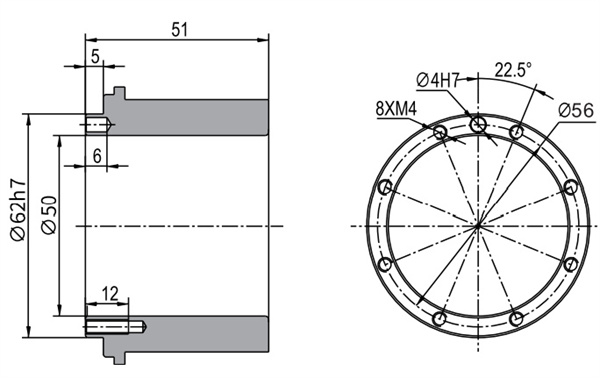
A-dir finis iuncturam LABIUM magnitudine;
Product Features
Brachium range est 1.5 metrorum. Permultum consilium compactum praebet flexibilitatem ad eligendum pavimentum vel institutionem inversam. Magnum opus spatium, celeritas celeritas et iterabilitas magna, apta ad applicationes glutino et amplis applicationes habet.
Reductor est potissima pars roboti, NEWker-CNC utens notam insignem Sinensium DuxDrive pro RV et harmonica reducens, propter robot moderatoris nostrum proprium consilium est, robot aptus late area, et etiam omnia genera roboti structurae regere possunt, sicut ABB, Kuka, Kawasaki, Fanuc etc.
NEWker-CNC robot moderatoris ab 2 ad 24 axe, robot brachium ab 4kg ad 160kg, cum functione docenda, G code, programmata offline, munus inquisitionis, munus visionis, munus sequi etc, competere in quolibet campo, sicut glutino, palletizing, onere et exonerare, tractando, poliendo etc.
NEWKER brachium roboticum gignit et imperium late applicantur in glutino, secando, palletando et tractando.
Praeter has, etiam varias applicationes personales praebere possumus, ut inkjet, capulus, sculptura, scriptura, etc. omnibus locis laboris substituit.
Diversas fixturas praebere diversis necessitatibus in autocinetis, militari, constructione, agricultura, aerospace et aliis agris.
NEWKER operationes sunt etiam simplices et faciles utendi.
NEWker primus fabricarum in Sinis duplicem alveum coegi obtinuit et primus fabricator in mundo ut G codicibus brachium roboticum applicavit.









