60 SERIES SERVORUM MOTORORUM
60 seriei servo motoris;
| Rated Torque(N ·m) 0.637 1.27 1.91 | |||
| Exemplar | 60-00630 | 60-01330 | 60-01930 |
| Rated Power(kW) | 0.2 | 0.4 | 0.6 |
| Current Rated (A) | 1.2 | 2.8 | 3.5 |
| Max Torque (N ·m) | 1.91 | 3.9 | 5.73 |
| Rated Mobilitate (r/min) | 3000 | 3000 | 3000 |
| Rotor Inertia (Kg ·m2) | 0.175×10-4 | 0.29×10-4 | 0.39×10-4 |
| Torque Coefficiens (Nm/A) | 0.53 | 0.45 | 0.55 |
| Voltage Constans(V/1000r/min) | 30.9 | 29.6 | 34 |
| Vulnus filum (Ω) | 6.18 | 2.35 | 1.93 |
| Wire-inductance (mh) | 29.3 | 14.5 | 10.7 |
| Electrical Time Constantini (Mi) | 4.74 | 6.17 | 5.5 |
| Pondus (Kg) | 1.2 | 1.6 | 2.1 |
| Input intentione Coegi (V | AC220V | ||
| Numerus Encoder(P/R) | MMD / Absolutum genus 17bit | ||
| Pole-Pairs | 4 | ||
| Insulatio Classis | F | ||
| Environment | Temperature: -20℃~+40℃Humidity: Relative≤90% | ||
| Praesidium Classis | IP65 | ||
nexum;
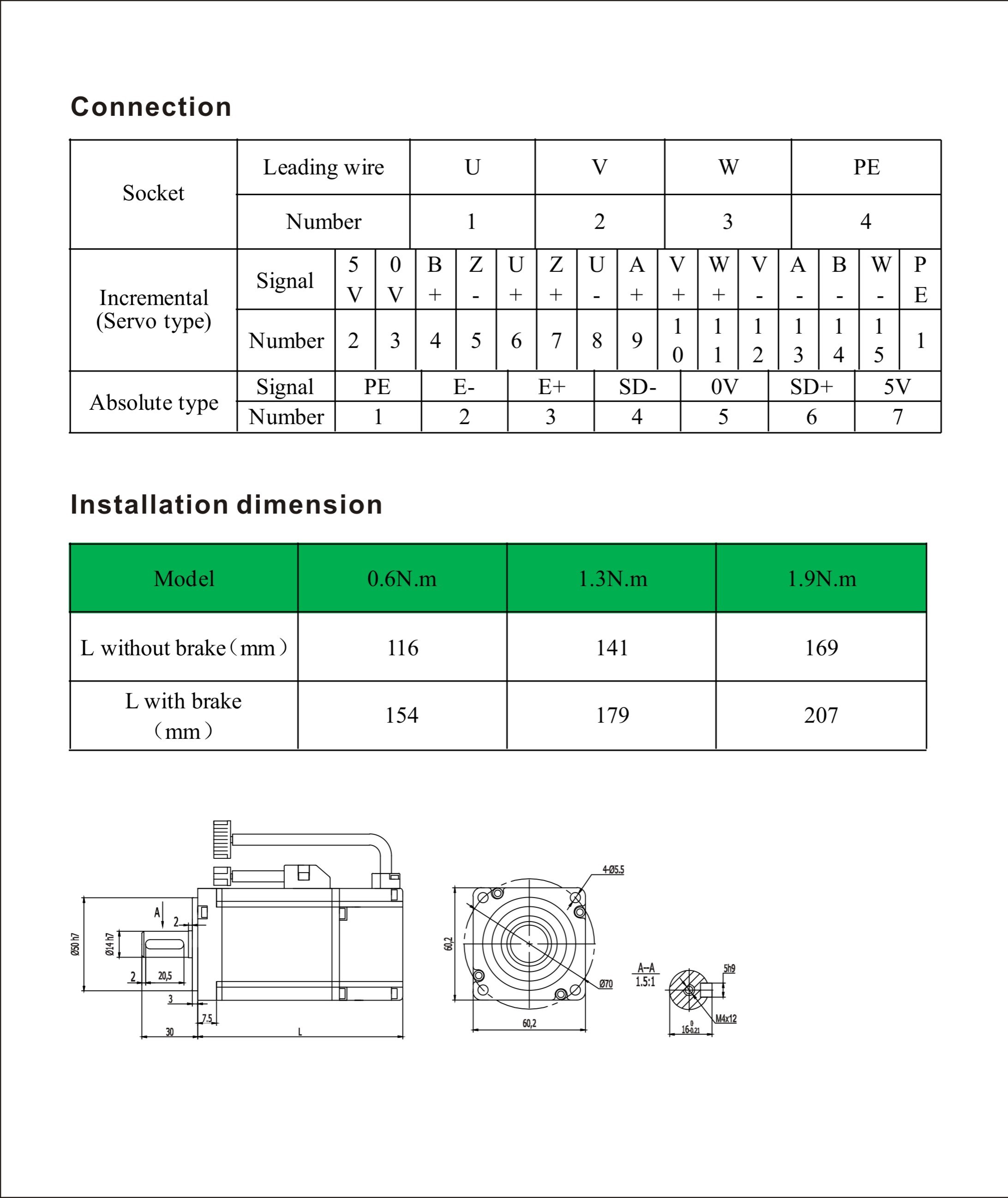
| Socket | ducens filum | U V W PE |
| Numerus | 1 2 3 4 | |
| Incremental (Servo typus) | Signum | 5v 0V B+ Z- U+ Z+ U- A+ V+ W+ V- A- B- W- PE. |
| Numerus | 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 | |
| Absoluta type | Signum | PE E- E+ SD- 0V SD+ 5V |
| Numerus | 1 2 3 4 5 6 7 |
| Exemplar0.6Nm | 1.3Nm 1.9Nm | ||
| Dominus sine fregit (mm) | 116 | 141 | 169 |
| L fregit (mm) | 154 | 179 | 207 |