110 series servo motoris;
| ModelRated Power (kW) | 110-02030 | 110-04020 | 110-04030 | 110-05030 | 110-06020 | 110-06030 | | 0.6 | 0.8 | 1.2 | 1.5 | 1.2 | 1.8 | | RatedCurrent (A)MaxTorque (Nm) | 2.5 | 3.5 | 5.0 | 6.0 | 4.5 | 6.0 | | 6 | 12 | 12 | 15 | 12 | 18 | | RatedSpeed (iVmin)RotorInertia (Kg-m2) | 3000 | 2000 | 3000 | 3000 | 2000 | 3000 | | 0.31 X10-3 | 0.54X103 | 0.54X103 | 0.63 X10-3 | 0.76X10-3 | 0.76 X10-3 | | Torque Coefficiens (N.mMCouter EMF(V/1000r/min) Wire-vulnus (Q) Wire-inductance (mh) Electrical Time Constant (Ms) | 0.8 | 1.14 | 0.8 | 0.83 | 1.3 | 1.0 | | 56 | 79 | 54 | 62 | 83 | 60 | | 3.6 | 2.41 | 1.09 | 1.03 | 1.46 | 0.81 | | 8.32 | 7.3 | 3.3 | 3.43 | 4.7 | 2.59 | | 2.3 | | 3 | 3.33 | 3.2 | 3.2 | | Pondus (Kg) Input intentione Coegi (V) | 4.5 | 6 | 6 | 6^8 | 7.9 | 7.9 | | AC220V | | Numerus Encoder (P/R) Pole-Pairs | MMD / Absolutum genus 17bit | | 4 | | Insulatio Classis | F | | Environment | Temperature: -20°C~+40°C Umor: RelativeOO% | | Praesidium Classis | IP65 | |
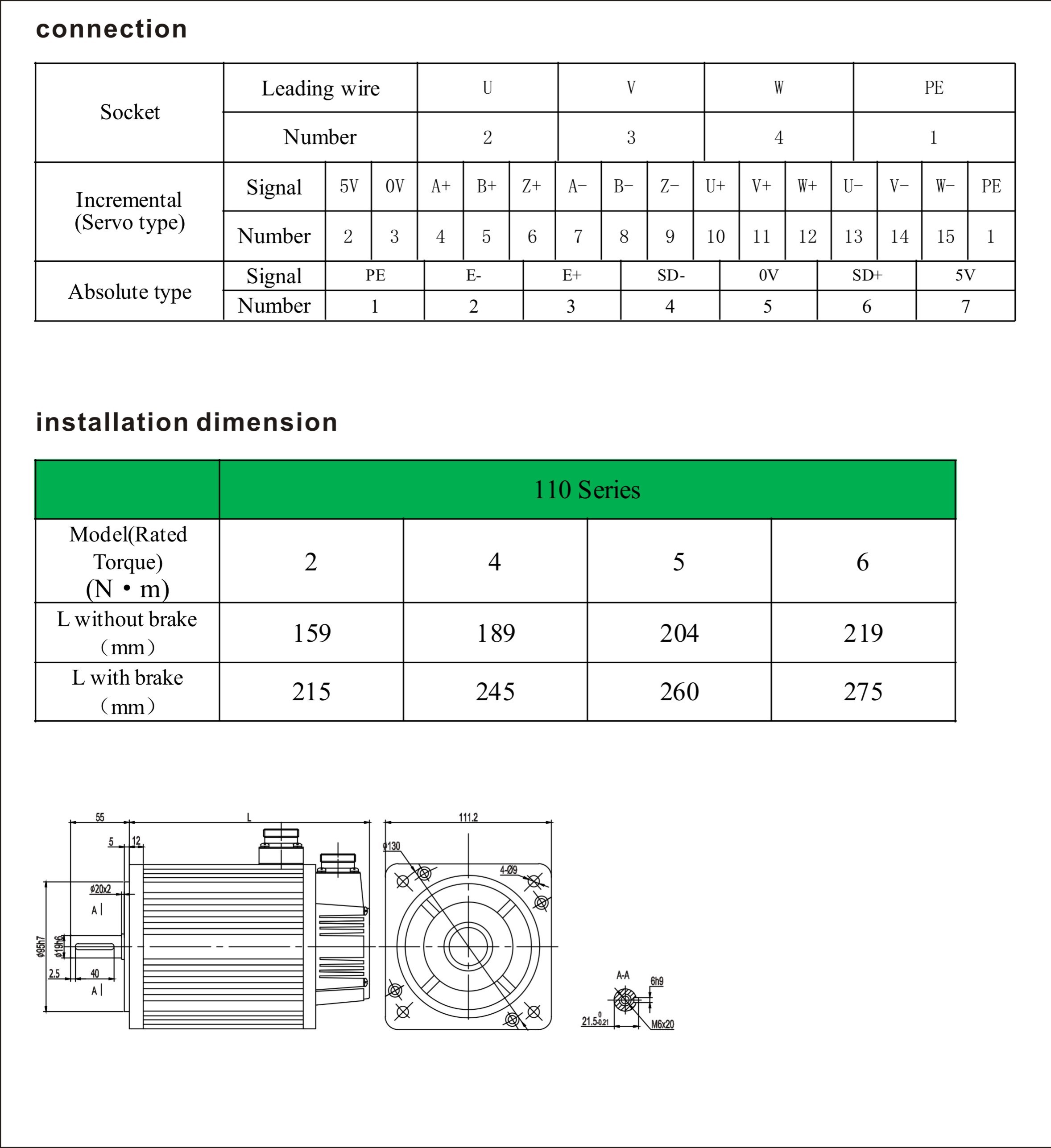
nexum;
| Socket | ducens filum | U | V | W | PE |
| Numerus | 2 | 3 | 4 | 1 |
| Incremental | Signum 5V 0V A+ | B+ Z+ A- B- | Z- U+ | V+ W+ | U- V- W- PE* |
| 'genus) | Numerus 2 3 4 | 5 6 7 8 | 9 10 | 11 12 | 13 14 15 1 |
| Absoluta | Signum PE | E- E+ | SD- | OV | SD+ 5V |
| type | Numerus 1 | 2 3 | 4 | 5 | 6 7 |